


 时刻新闻
时刻新闻

国防科技大学磁浮技术工程研究中心教授、学术带头人李杰(左三)和他的团队。
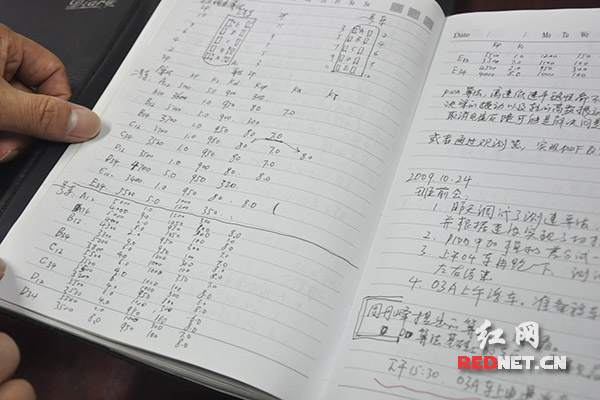
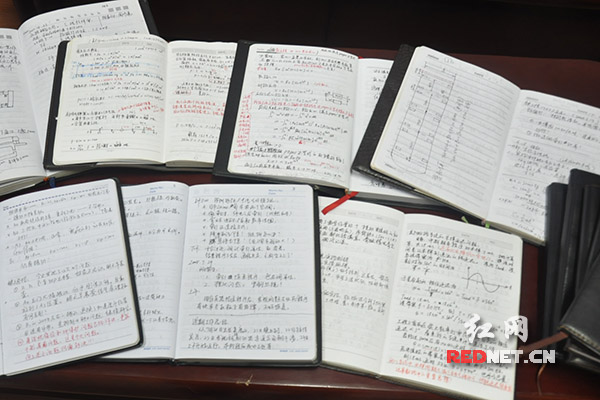
悬浮控制系统数字化改造过程中,哪个参数调高或调低了,性能变好还是变坏,两年多的时间里,李杰记满了十几个笔记本。
“现在不翻那些笔记本,都不知道那些年去了哪儿。”李杰笑着说。
红网专题:“追风”湖南速度
红网时刻新闻记者 秦芳 长沙报道
5月6日,中国第一条具有自主知识产权的中低速磁浮商业运营示范线——长沙磁浮线正式启动载客运营。如子弹头般的列车,从闹市到城郊,悄然穿行。运行平稳、速度快、噪声低,人们看到的,是这位99%“中国小姐”姿态的华丽与优雅。
作为国内最早着手研发磁浮交通技术的团队,国防科技大学磁浮技术工程研究中心承担了长沙线目前五列磁浮车其中一列的研制工作,并将接手将于未来几年内配属的两列车。而研制中所应用到的核心技术,即是获得2015年度湖南省科技进步奖一等奖的“中低速磁浮列车悬浮控制技术”。
从课程设计中对一颗悬浮小球的控制开始,到受1985年日本筑波世博会上首次亮相的磁浮列车启发,于1989年研制出国内第一辆试验小车CMS01,再到6吨单转向架试验车,到最终投入商业运营的整车,磁浮技术工程研究中心着手磁浮列车研究已有三十多年。
因此,研究中心教授、学术带头人李杰心中十分清楚,这种优雅的铸就,不是一朝一夕实现的突破,而是涉及多个技术难点和人为阻力的长期攻关。
“项目一个个夭折”
在长沙线开通运营前,李杰介绍,磁浮技术工程化应用的推广并不顺利。“都不认为这是一个成熟的技术,特别是各个城市的决策层,觉得修一条磁浮线带来很多风险,没必要。”
刚开始,他们只能从旅游线、试验线工程“下手”。1999年初,全程2公里多的北京八达岭长城旅游示范线被提上议事日程,但由于北京市主要领导人变更,且认为“八达岭长城是历史文物,修建磁浮线与环境不相协调”,该项目搁浅。
2003年,昆明世博园线进入规划,“折腾”两年后,2005年底,世博园被从中间截成两段,北边改为别墅区,再无修磁浮线的必要,两年多的前期准备于是付诸东流。
值得庆幸的是,2006年,“中低速磁浮交通技术及工程化应用研究”项目得到“十一五”国家科技支撑计划的支持,终于建了一条长达1.5公里的唐山试验线。2009年6月15日,中国首列“具有完全自主知识产权”的实用型中低速磁悬浮列车在唐山下线,时速达到108公里。
2009年,北京时任主要领导参观唐山项目后,决定修建北京示范线S1线,经历一些波折,S1线项目于2011年正式启动,但由于环保争议和审批等原因迟迟未能实质性动工,直至2014年10月才陆续开工。据《北京日报》报道,S1线预计今年年底全线贯通。
“最主要的阻力,就是一个新生事物出来以后,包括技术层面和决策层面的人,对它的认识都有一个过程。”李杰认为,磁浮列车从研发走向应用过程中经历的种种曲折,实际上是人们要为绝大多数新生事物付出的一种“认知成本”。
不过,回过头来看,他并不觉得这其中存有多大的遗憾,因为“尽管项目一个个夭折了,但在这个过程中,技术也在不断地完善。”
悬浮传感器的优化:那一次,他们被骂得狗血淋头
“不遇到那个事,现在照样出问题。”
李杰说的那件事,发生在一次很重要的参观中。那一次,北京市的主要领导带着磁浮项目意向投资人去唐山试验线参观,车却无法正常运行。
那时李杰还不在现场,只有他的两个学生在,只差没被骂哭,急得不得了。“出了这个问题就非常紧张,参观的领导在电话里骂,影响投资的这么大的一个参观,关键时刻不搞好。”
究竟哪里出了问题?大家研究了很长时间才找到原因。原来,磁悬浮是依靠传感器不停检测列车车底与轨道间的间隔高度,不停地发出调节控制信息,传感器测得准,才能控制得好,这就高度依赖传感器的精度。
“参观那天突然下大雨,结果雨滴在上面,传感器自己就测不准了,输出的间隔就不是8毫米,车就没办法跑,这就叫传感器的漂移。”那为何原来下大雨都没关系?实际上的原因是什么?大家慢慢发现,开始运行时,新的轨道上有油漆,水滴上去很干净,但时间长了以后,经常受摩擦的轨道上会生锈,这时候水滴上去,就会有铁锈溶在水里,“传感器就怕这种铁质材料。”
“这个事情后,我们就与厂家合作,对传感器做改进,也经历了一两年。”李杰告诉记者,现在长沙线磁浮车上的传感器,都是改造后的传感器。
悬浮控制系统的数字化:两年只为调试一组参数
对于磁浮车而言,悬浮控制系统可说最重要、最核心的系统,也是国防科大团队的主要研究技术。不过,在2005年之前,由于模拟控制电路对外界环境变化的敏感,这项技术并不那么让人放心。
“一条线,晴天参观还挺好,下雨天参观就不行了。”原来,李杰介绍,模拟控制电路的问题是,受外界温度或湿度变化,电阻发生变化,原本调试好的参数就会漂移。而修改一条设计好的模拟控制电路,得重新换电路板。而数字电路,“一条电路做好了,坐在办公室改程序就行。也不受环境变化的影响。”
“这个问题不解决,车就没法用。人家想修磁浮,来这看看,结果一上车,车不停地抖,谁都不敢决策。”2003年,李杰开始主持项目,下定决心用当时渐渐流行起来的数字控制技术对电路进行改造。
听起来简单的替换,过程却不简单。解决问题的心情急切,李杰和他的团队一天三班倒地跑在试验线上,饿了就订个盒饭,凌晨一两点了才去吃饭也是常事。
2003年到2005年,为了一组合适的参数组合,他们花了整整两年时间。“因为当时也不知道数字化行不行,不断地摸索,全部程序化以后,就开始调哪个参数合适。”20个控制器,这里参数调大一点,那里又不合适。哪个参数调高或调低了,性能变好还是变坏,两年多的时间里,李杰记满了十几个笔记本。
两年只为调一组参数,不会觉得很枯燥吗?“这事看起来比较枯燥,但是在不断地进步,哎,突然间性能调高了一点,大家就很高兴。再做一些优化,又提高了一点,每天你都能看到希望。最后两年多过来车跑起来就很稳定了,不抖了。搞技术的人追求的就是这样。”
“现在不翻那些笔记本,都不知道那些年去了哪儿。”李杰笑着对记者说。